Abstract
Industrial robots play a crucial role in the era of Industry 4.0, characterized by the advancement of digitalization and automation. This development trend is strongly felt in the textile and clothing industry, too, and cannot be ignored when developing production facilities to streamline manufacturing processes. Industrial robots enable more efficient manufacturing processes, especially in repetitive and physically demanding tasks. Their aim is to serve production machines efficiently and autonomously, not to produce the product itself, but to support the production machine. This is particularly important in sectors such as the textile and clothing industry, which typically have a very high demand for labor. The article summarizes the main differences between simple mechanical machines, automated machines, and robots: simple mechanical machines require human intervention and have a fixed function, automated machines operate based on pre-programmed instructions and are moderately flexible, while robots are fully programmable, capable of adapting to changing tasks and operating autonomously, making decisions with the help of sensors. The article – based on real, working examples found on the internet, listed at the end of the article – presents the use of robots in the textile and clothing industry, which facilitate work in warehousing, yarn production, dyeing, fabric inspection, sewing, and textile cleaning. We aimed to engage textile and clothing companies by presenting these opportunities. However, the social impacts of robotization cannot be ignored. If simple manual labor is replaced by robots, people performing such work must be retrained for more productive tasks so that they do not lose their livelihoods. This imposes responsibilities on both the state and companies, which must provide retraining opportunities.
Keywords
Textile and Clothing Industry, Industrial Robot, Cobot, Automatic Machine
1. Introduction
Industrial robots will play a prominent role in the Industry 4.0 industrial revolution, an era of digitalisation, automation and intelligent connections between data. In this process, industrial robots will become a key component of a digitalised manufacturing environment.
The role of industrial robots in the context of Industry 4.0 is crucial for the modernisation and optimisation of manufacturing processes. By integrating data with intelligent systems, they enable manufacturers to remain competitive while contributing to a sustainable and efficient industrial future.
The present Review Article provides a definition of the concept of industrial robots, automatic machines and robots with special focus on those applied in the textile industry, and finally it also summarises the social impact of the robotisation on the industry. To this end, relevant literature was compiled from diverse source including but not limited to primarily by using the search terms “industrial robots”, “robots in the textile and clothing industry” etc. but also from other publicly available technical books in Hungarian language.
2. The Concept of Industrial Robot
According to the international standard ISO 8373:2012, an industrial robot is a fixed or mobile, multi-function, reprogrammable, automatically controlled, programmable manipulator with three or more axes, suitable for use in industrial automation applications.
In other words: an industrial robot is a reprogrammable, multi-purpose manipulator (a material handling device: it grasps objects, changes their spatial position or holds them in place, and then releases them) that moves a material, a component, a tool or a specific device – according to a variable program – to perform a number of task variations.
An industrial robot typically consists of the following functional elements
:
Control: provides the robot with the memory and processing capability required for operation. The robot's control system acts as the “brain”.
Sensors: robots use sensors to collect data from their environment - these are the robot's "eyes" and "ears".
Propulsion and power source: the robot can be electrically, pneumatically, hydraulically or any other type of propulsion.
Robotic arm: designed to mimic the human arm, robotic arms are structures that consist of several segments connected by joints. The joints can be programmed to move in the desired direction.
Arm-end tools/operators: equipment/operators connected to the end of the robot arm, designed for the intended use, and used to perform specific operations such as welding, material handling, painting, assembly, etc. Some industrial robots support the exchange of tools/tools to perform different operations.
Industrial robots allow you to carry out your production process more efficiently and accurately. They are ideal for repetitive, physically demanding tasks and are capable of higher performance in shorter times, increasing production capacity. They work accurately and quickly, minimising the potential for error and scrap. They automate dangerous tasks, reducing the risk of workplace accidents. Their built-in sensors and cameras allow you to automate quality control, ensuring defect-free products. Human–robot collaboration (the use of collaborative robots, or cobots) opens up new possibilities in manufacturing, complementing the capabilities of robots and humans.
They also have an important role to play in the integration of intelligent manufacturing systems, because they can communicate with each other and with other devices in the manufacturing environment, enabling closer collaboration and coordinated operations. Robots can be easily programmed and reconfigured to quickly adapt to new products or changes in production processes. This flexibility is key to adapting to rapidly changing market needs and maintaining competitiveness.
According to their purpose, industrial robots can be
1) material transporter, material handler, palletiser,
2) servicing technological machines and
3) robots performing technological operations (welding, painting, assembly, measuring, etc.).
Industrial robots are generally used for low value-added, simple, repetitive tasks, mainly in mass production, where they can replace unskilled factory workers.
The industrial robot and the cobot are distinguished from the “simple” mechanical machine (driven by man or machine, but in any case, manually operated) and the “simple” automated machine with several types of self-operated, partly programmable components by the characteristics listed in
Table 1.
3. Automatic Machines and Robots
Machines commonly called automatic machines, or automats for short, are characterised by:
1) Simpler functionality: these are usually machines designed to perform a specific, repetitive task with limited programmability.
2) Mobility: automatic machines are usually stationary, performing their tasks permanently at the place of installation.
3) Less flexibility: they do not adapt easily to changes in the task or environment. Major changes usually require reprogramming or mechanical adjustments.
In contrast, the general characteristics of robots – and industrial robots in particular – are:
1) Advanced functionality: sophisticated machines equipped with sensors, controllers and programmable arms. They can perform a wider range of tasks and adapt to changes in programming or the environment.
2) Mobility: in some cases, robots can be relocated to different places to perform tasks where they are needed, or even to find the places where they need to perform a task themselves, according to the instructions of their built-in software.
3) Greater flexibility: industrial robots can be reprogrammed for different tasks or to handle different variations within a task. They can therefore be adapted to complex or dynamic production environments.
Machinery for the production of semi-finished or finished textile products (yarns, various fabrics and made-up products) is now generally classified as “simple” mechanical machinery or automated machinery. Let’s see some examples:
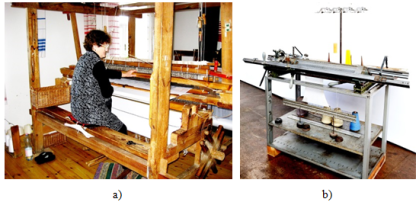
1) The hand-weaving machine (
Figure 1a) is a typically “simple” machine: it is operated by human power: hands and feet. The flat knitting machine (
Figure 1b) is also driven by hand, although sometimes by an electric motor, but the operations necessary for the patterning and fashioning of the knitted sheet are carried out by hand. In all cases, it is typical that one person can operate and handle only one machine at a time.
Figure 1. Simple mechanical machines.
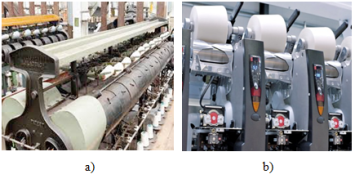
2) A motor-driven weaving machine with automatic weft changer, stop motions, possibly with jacquard equipment (
Figure 2a), or a motor-driven knitting machine with program-controlled patterning and automatic fashioning (
Figure 2b) can be considered as “automatic”. One person can simultaneously supervise and service several such machines.
Figure 2. Automatic machines.
3) “Simple” machine is also a foot-operated household sewing machine (
Figure 3a), but “semi-automatic” machine is a motor-driven sewing machine which can be programmed to sew different types of seams (
Figure 3b) and which then produces the seams according to the selected program but requires direct human intervention to perform the sewing operation, i.e. to move the position of the workpiece to be sewn according to the sewing direction. An “automatic” machine, on the other hand, is, for example, a buttonhole sewing machine (
Figure 3c), driven by an electric motor and capable of sewing a straight or keyhole buttonhole completely finished according to the program loaded, making seam sections of different sizes and directions by moving the workpiece automatically. However, the insertion and removal of the workpiece is also a manual operation. Also included in this category are button-sewing machines and assembly machines for the manufacture of semifinished parts such as pockets, shoulder straps, collars, etc.
Figure 3. Manual, semi-automatic and automatic sewing machines.
4) “Simple” machine is a cross-winding machine which is only capable of lifting the finished bobbin off the winding drum when the set bobbin size is reached (
Figure 4a). The “automatic” winding machine automatically repairs broken ends by knotting or splicing when the spool is dispensed, puts a new spool from the bobbin-holder when the spool runs out, cuts the bobbin when the required size of the cone is produced, removes the cone and starts to produce a new one by inserting a new tube (
Figure 4b).
Figure 4. Simple and automatic cross-winding machines.
According to the definitions given in
Table 1, among the machines listed above are no machines that can be classified as “robots”, only “automated machines”, mainly because they are not “intelligent”: they all operate only following preprogrammed instructions, although their programming can be modified and they will then continue to work according to the new program, but they cannot adapt automatically to new circumstances when normal conditions change.
Table 1. Comparison of simple mechanical machines, automated machines, industrial robots and cobots.
Characteristic feature | Simple mechanical machine | Automated machine | Industrial robot | Cooperative robot (cobot) |
Autonomy | It requires human intervention to work. Performs specific tasks without adaptability or decision making | It follows limited, pre-programmed instructions. Unable to make independent decisions | Ability to operate autonomously and make decisions within pre-defined parameters based on perception of the environment, react to changes | It has a high degree of autonomy, but is designed to work with humans. It is equipped with safety features to operate safely in a shared workspace with humans |
Programmability | Not programmable | Limited programmability, but modifying the program can be complicated | Fully programmable and easy to modify the programme | Relatively simple to program according to the operation in question |
Intelligence | It works according to fixed instructions or physical principles. It has no intelligence or learning ability | Limited, its operation is based on pre-programmed instructions. Not related to learning ability | It can have different levels of intelligence, can even use artificial intelligence and can be capable of learning | It can have different levels of intelligence, but it can also interact with humans. Complement human activity to make work more efficient |
Complexity | Simpler architecture | More complex architecture, including sensors and actuators | Complex system with sensors, actuators, processors and software | Its complexity is similar to robots but adds safety features for working with humans |
Flexibility | Designed for one task | Limited flexibility | Programmed to do the same job continuously over a long period of time | Can be programmed for frequently changing workloads |
Mobility | Fixed position | Fixed position | Different mobility levels are possible, from fixed position to fully mobile robots | Easy to move to another job if necessary |
4. Industrial Robots in the Textile Industry
The word “robot” comes from the Czech word
robota, meaning
forced or
compulsory labour. It was first used by
Karel Čapek in a play, referring to a “human-shaped machine” that works instead of living humans.
If we understand the word “robot” in this original sense (although of course with a difference from the “human form”), then industrial robots in the textile industry can be considered as programmable devices equipped with sensors, which can partially or completely replace human labour in the production process, directly or indirectly serving the production machine or the production process, including material handling, product feeding and packaging. Industrial robots work alongside traditional manufacturing machines, but they are not the machines that directly produce or process the textiles themselves.
The machine itself – simple mechanical or automated – which produces or processes the product is therefore not a robot, but the robot is the automatically operating auxiliary device which is capable of correcting a fault in this machine, of supplying the machine with the material to be processed/machined, of removing the finished product, of transporting, storing, packaging it, etc. – that is to say, of performing the operations, either automatically or possibly with the addition of human labour, which are necessary to complete the production of the finished product.
In this interpretation, industrial robots in the textile, clothing and textile cleaning industries are currently mainly used in the following areas:
1) Warehouse robots. – These robots are used to load, store and move a wide variety of materials (raw materials, semi-finished products, finished goods, supplies, etc.) within a factory (
Figure 5). In robot-managed warehouses, the robot places materials randomly on racks (to make the best use of space), but the software that controls the robot knows the location of each item and all the important indicators. When a particular item is needed and is entered into the robot management software, it is automatically searched for and retrieved from the warehouse.
Figure 5. ONTEC warehouse robot.
2) Application of robots in yarn production. – The ROBOspin robot by Rieter can be used for ring spinning machines and other systems (
Figure 6). It walks in front of the machine and, based on the information received from the yarn break detection system, searches for and corrects yarn breaks by rejoining the broken yarn ends.
Figure 6. Rieter ROBOspin robot for repairing of yarn breakage.
Saurer's AGV robot (
Figure 7) automatically picks up the cones from the pallet on which they are stored and places them one by one on its own rack. It then transports it automatically to the next operation position and loads it onto the winding rack of a processing machine (e.g. a twisting machine).
Figure 7. Saurer AGV robot for placing of cones.
3) Dyehouse robot. - For example, Thies' iCont yarn dyeing machine (
Figure 8) has a robot that picks up the prepared bobbins, places them on a self-propelled conveyor, inserts them into the dyeing machine and then, at the end of the dyeing process, removes them and transfers them to the dryer. This also means that the lid of both the dyeing and drying machine must open and close automatically at the appropriate times. The person working in the plant no longer has to do the loading and unloading, but only has an observer role in this system.
Figure 8. Thies iCont bobbin dyeing apparatus.
The automated dye kitchen can also be considered a robot. When it receives a signal from one of the dyeing machines in the system, telling it what quantity of which dyestuff and the required auxiliary materials it needs, it automatically measures out these materials, dispenses them into a container, dissolves them and transfers them to a container from where the machine sucks them in at the right time.
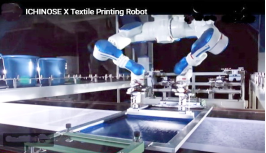
4) Robotisation of flat screen printing. – The Japanese robot Ichi-nose X has been developed for flat screen printing (
Figure 9). The robot's arms are used to load the different inks into the printing template, to move the template and the knife to push the ink pulp through the template's slots, completely mimicking the movements of human hands and arms, thus automating the operation with high speed and precision.
5) Fabric quality control robot. - The inspection of finished fabrics is one of the most difficult textile processes to automate. Cameras and other sensors are used to check textiles for defects. Different techniques can be used for automatic fabric inspection. Each of these methods uses artificial intelligence to feed the image of the fabric into a computer using software or modelling, which compares it to the structure and image of the fabric being inspected. If it detects a significant deviation from this, an error is indicated. The extent of the permissible deviation is fed in on a statistical basis. If the amount of errors in a batch exceeds a certain limit, the batch is rejected (
Figure 10).
6) Fabric roll handling. - Chinese company Suntech is offering a robot for packing fabric rolls connected to several fabric inspection machines (
Figure 11). It groups the fabric rolls from the different inspection machines according to their type and stores them individually wrapped in foil, and sorts them severally.
Figure 11. Roll wrapping robot, linked to a group of fabric inspection machines (Suntech).
7) Sewing robots. – The above-mentioned automated sewing machines can be complemented by devices that can be classified as robots, which automatically feed the pre-made and lined-up parts to the sewing machine, positioning them in the correct place and direction, and even remove, load or transfer the finished sewn piece to the next workstation using robotic arms. The most delicate operation of robotisation in this field is the safe gripping, handling and precise positioning of flexible, crease-prone textiles. The sewing robot has to “see” what is happening to the piece and adjust it if necessary. Using appropriate cameras, the robot can independently correct its own work.
Invented by
Jonathan Zornow in 2015, the “Sewbo” robot (
Figure 12) is used to grip and move the part to be sewn. As an experiment, the device has been tested for fully automated sewing of a T-shirt. The success of the experiment showed that it is technically possible to sew an entire garment fully automatically. The robot can be programmed to a specific size and shape, but if the size or shape of the garment changes, the robot must be reprogrammed.
The LOWRY
® “SewBot” is an invention of the American company Softwear Automation (
Figure 13). It is a special type of robot designed for the garment industry, in fact a production line in which a robotic arm places the workpiece on a conveyor table that can rotate in all directions and guides it through the production process, from cutting and sewing to inspection and labelling. All these operations are controlled from a single touch screen. It speeds up and reduces production costs by 50–70%.
The use of robotic
three-dimensional (3D) sewing technology can open up new possibilities in sewing. This technique, which can produce a seam in three dimensions in a fully automated way, was invented by Philipp Moll GmbH & Co (
Figure 14). The sewing robot arm, which moves in three dimensions, uses a laser scanner to detect parts and sews them together with programmed movements, then cuts off the thread remnants and releases the finished product. The process is currently used to sew seat covers and airbags, but can also be used to sew clothing (trousers, jackets, shirts).
8) Ironing robot. – A “hand ironing” robot (
Figure 15), which can be programmed according to the product to be ironed, can be used to replace manual ironing in both garment factories and textile cleaning plants.
9) Packaging robots. – Folding and packaging robots play a key role in automation in the clothing as well as in the textile cleaning industry, for folding, bagging (possibly also shrink-wrapping) or boxing and labelling goods. They can be considered robots because they can be programmed for multiple products and perform all operations from folding to size/shape to bagging or boxing without human intervention.
10) Laundry robots. – Robotic systems with sensors and computer control can manage a variety of processes in laundries. The handling of textiles by robots is made difficult by the flexibility of the fabric and its tendency to crease. Robots in laundries are used for transporting laundry materials, sorting them according to colour, soiling or other characteristics, loading them into the washing machine, unloading them from the washing or drying machine, preparing them for ironing, feeding them and folding them. Their use not only saves manpower but also minimises the risk of mishandling or damage to delicate fabrics. Folding machines are estimated to account for 30% of laundry staff costs, but labour shortages are particularly acute for these repetitive manual tasks. This is also helped by the use of robots.
11) Cleaning robots. – There are several types of industrial cleaning robots. Among others, self-propelled, self-operated robots have been developed that not only clean the floors from debris and mop up, but also brush the sides of the machines to remove flocks etc.
5. The Social Impact of Robotisation on the Textile and Clothing Industry
The rapid development of robotisation and automation has significant societal impacts, affecting the labour market, education and quality of life.
One of the most obvious impacts is the evolution of the labour market. Robotisation and automation may be associated with a reduction in the number of jobs and a significant transformation of jobs. Workers whose jobs are taken over by robots will be forced to acquire new skills (further their education) or to try to find a new career.
Textiles, and especially clothing, are traditionally labour-intensive sectors where manual labour plays important role. The introduction of robotisation will make it possible to make production processes more efficient, increase productivity and eliminate problems caused by human error. The use of robots makes many work processes easier, faster and more accurate. As a result, labour requirements and, consequently, production costs are reduced.
At the same time, for traditional workers, this could threaten their livelihoods and employment. Regions and countries where the textile and clothing industry has traditionally played a significant economic role may be particularly affected by job changes. Workers may need retraining and new skills, which poses challenges in terms of education and retraining for both governments and enterprises.
However, robotisation can also affect social structures and norms. For example, robotisation can increase the technological gap between rich and poor countries, which can further increase global inequalities.
Robotisation and automation have significant societal impacts to which social, economic and educational systems need to respond, but a balance between technological development and societal needs is necessary for balanced and sustainable development.
6. Conclusions
Reviewing the extensive information available on the use of robots in the textile and clothing industry, the solutions already in operation and those under development, it is clear that there is a strong drive to increase the technical level and efficiency of production in this sector. The spread of robots will certainly continue, with social challenges to be taken into account.
Author Contributions
Károly Lázár is the sole author. The author read and approved the final manuscript.
Conflicts of Interest
The author declares no conflicts of interest.
Cite This Article
-
-
@article{10.11648/j.ijimse.20240901.11,
author = {Károly Lázár},
title = {Industrial Robots in the Textile and Clothing Industry
},
journal = {International Journal of Industrial and Manufacturing Systems Engineering},
volume = {9},
number = {1},
pages = {1-9},
doi = {10.11648/j.ijimse.20240901.11},
url = {https://doi.org/10.11648/j.ijimse.20240901.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ijimse.20240901.11},
abstract = {Industrial robots play a crucial role in the era of Industry 4.0, characterized by the advancement of digitalization and automation. This development trend is strongly felt in the textile and clothing industry, too, and cannot be ignored when developing production facilities to streamline manufacturing processes. Industrial robots enable more efficient manufacturing processes, especially in repetitive and physically demanding tasks. Their aim is to serve production machines efficiently and autonomously, not to produce the product itself, but to support the production machine. This is particularly important in sectors such as the textile and clothing industry, which typically have a very high demand for labor. The article summarizes the main differences between simple mechanical machines, automated machines, and robots: simple mechanical machines require human intervention and have a fixed function, automated machines operate based on pre-programmed instructions and are moderately flexible, while robots are fully programmable, capable of adapting to changing tasks and operating autonomously, making decisions with the help of sensors. The article – based on real, working examples found on the internet, listed at the end of the article – presents the use of robots in the textile and clothing industry, which facilitate work in warehousing, yarn production, dyeing, fabric inspection, sewing, and textile cleaning. We aimed to engage textile and clothing companies by presenting these opportunities. However, the social impacts of robotization cannot be ignored. If simple manual labor is replaced by robots, people performing such work must be retrained for more productive tasks so that they do not lose their livelihoods. This imposes responsibilities on both the state and companies, which must provide retraining opportunities.
},
year = {2024}
}
 Copy
|
Copy
|
 Download
Download
-
TY - JOUR
T1 - Industrial Robots in the Textile and Clothing Industry
AU - Károly Lázár
Y1 - 2024/09/23
PY - 2024
N1 - https://doi.org/10.11648/j.ijimse.20240901.11
DO - 10.11648/j.ijimse.20240901.11
T2 - International Journal of Industrial and Manufacturing Systems Engineering
JF - International Journal of Industrial and Manufacturing Systems Engineering
JO - International Journal of Industrial and Manufacturing Systems Engineering
SP - 1
EP - 9
PB - Science Publishing Group
SN - 2575-3142
UR - https://doi.org/10.11648/j.ijimse.20240901.11
AB - Industrial robots play a crucial role in the era of Industry 4.0, characterized by the advancement of digitalization and automation. This development trend is strongly felt in the textile and clothing industry, too, and cannot be ignored when developing production facilities to streamline manufacturing processes. Industrial robots enable more efficient manufacturing processes, especially in repetitive and physically demanding tasks. Their aim is to serve production machines efficiently and autonomously, not to produce the product itself, but to support the production machine. This is particularly important in sectors such as the textile and clothing industry, which typically have a very high demand for labor. The article summarizes the main differences between simple mechanical machines, automated machines, and robots: simple mechanical machines require human intervention and have a fixed function, automated machines operate based on pre-programmed instructions and are moderately flexible, while robots are fully programmable, capable of adapting to changing tasks and operating autonomously, making decisions with the help of sensors. The article – based on real, working examples found on the internet, listed at the end of the article – presents the use of robots in the textile and clothing industry, which facilitate work in warehousing, yarn production, dyeing, fabric inspection, sewing, and textile cleaning. We aimed to engage textile and clothing companies by presenting these opportunities. However, the social impacts of robotization cannot be ignored. If simple manual labor is replaced by robots, people performing such work must be retrained for more productive tasks so that they do not lose their livelihoods. This imposes responsibilities on both the state and companies, which must provide retraining opportunities.
VL - 9
IS - 1
ER -
Copy
|
Download